Martin Raubal gave a talk titled “Towards Behaviorally Informed GeoAI for Spatial Decision-Making” at Münster. The presentation focused on the growing role of GeoAI and geospatial foundation models in spatial research and applications, while emphasizing that these approaches often pay limited attention to human behavior. It showed how neglecting cognition, habits, and biases can lead to misleading analyses and predictions that do not fully reflect lived human experiences.
Using examples from active mobility and aviation training, the talk demonstrated how behavioral insights can be incorporated into GeoAI to support more realistic and human-centered spatial decision-making for sustainability.
We are pleased to share that Dr. Ye Hong, a postdoctoral researcher at MIE Lab, will join the Department of Human Geography at Lund University as Assistant Professor in (Geo)AI and Regional Development starting in May 2026.
Ye’s research focuses on GIS, human mobility analysis, and generative (Geo)AI. His work develops data-driven methods to understand how people move and interact with urban environments, with applications in sustainable transportation, urban planning, and regional development.
At Lund University, Ye will continue advancing research on mobility data and artificial intelligence for spatial analysis, contributing to interdisciplinary work on sustainable urban systems and regional development.
We congratulate Ye on this appointment and wish him all the best as he begins this new chapter in Sweden.
Victoria is a visiting PhD student at the MIE Lab in fall 2025 and spring 2026. She has been pursuing her PhD at the Chair of Traffic Engineering and Control at the Technical University of Munich since 2022, and has a background in Computational Science and Engineering and Civil Engineering. Her research interests revolve around leveraging geospatial data to address transportation challenges. This includes the use of trajectory data for bicycle routing and mode choice modelling, where she employs optimisation and machine learning techniques to develop data-driven solutions.
Methodological focus: Spatio-temporal data mining and analysis, machine learning, and predictive models.
Martin Raubal gave the keynote speech at the ZVR Traffic Law Conference 2025 at the Vienna University of Economics and Business in Austria. His talk ‘Sustainable Mobility – quo vadis’ focused on the importance of geodata and -technologies for sustainable mobility and introduced current research on electric mobility, V2G technologies, and behavior change. The slides of the talk (in German) are available here.
Our new paper, “Quantifying the Impacts of Non-Recurrent Congestion on Workplace EV Charging Infrastructures”, is now published in Transportation Research Part D: Transport and Environment (Vol. 138, 2025). The study addresses a critical but overlooked issue: how unexpected traffic accidents and congestion ripple into EV workplace charging systems that rely on smart-charging and solar integration.
Motivation: Workplace EV charging is expected to play a major role in absorbing surplus midday solar energy. Smart-charging algorithms are typically optimised using historical travel patterns, but unexpected congestion can cause many EVs to arrive simultaneously once traffic clears. These concurrent arrivals create demand surges, raising operating costs and reducing trust in EV charging infrastructure.
Contribution: We develop a co-simulation framework that couples a scalable traffic simulator (Cell Transmission Model, CTM) with a high-fidelity EV charging simulator (ACN-Sim). The integrated pipeline:
Results & Policy Insights: Using Minneapolis as a case study, we find that non-recurrent congestion can increase Time-Of-Use (TOU) costs by up to 27%. However, access to timely accident information reduces these surprise costs by more than 50%, showing the value of integrating traffic data into charging operations.
Policy recommendations include: Installing slightly higher charging capacity (10–15% above historical demand), deploying faster Level 2 chargers for greater robustness, and co-optimising charging with building loads to reduce surprise costs. Investing in early-warning systems for traffic accidents incorporating and real-time traffic information utility coordination could also significantly reduce the risk propagation from the transpiration layer to the power system.
👉 Check out the open-source code and data on GitHub.
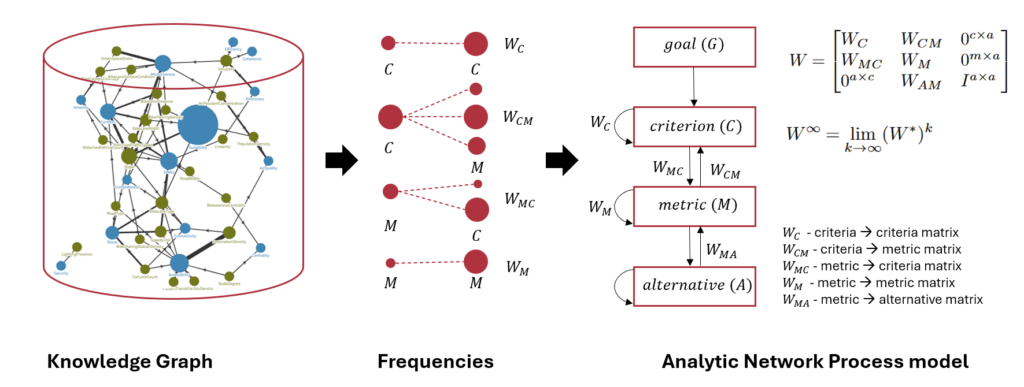
Our new paper, “Rethinking Bikeability Indexes: Fusing Knowledge Graph and MCDA Technique for Multi-criteria Bike Network Evaluations,” was presented by Ayda Grisiute at the 28th AGILE Conference on Geographic Information Science, 10–13 June 2025. It introduces a novel method for evaluating bike infrastructure by integrating a curated knowledge graph of bikeability metrics with the Analytic Network Process (ANP), a decision modelling technique.
The study addresses limitations in current bikeability indexes, which often oversimplify how different metrics interact. By combining over 270 metrics and 41 qualitative criteria from global studies with ANP’s ability to model interdependencies, our approach offers a more rigorous and transparent way to evaluate cycling networks. Applied to Zurich’s road network, the method produces a segment-level bikeability index and includes sensitivity analysis to assess the robustness of results under structural changes.
Check out our paper and the corresponding code on Github!
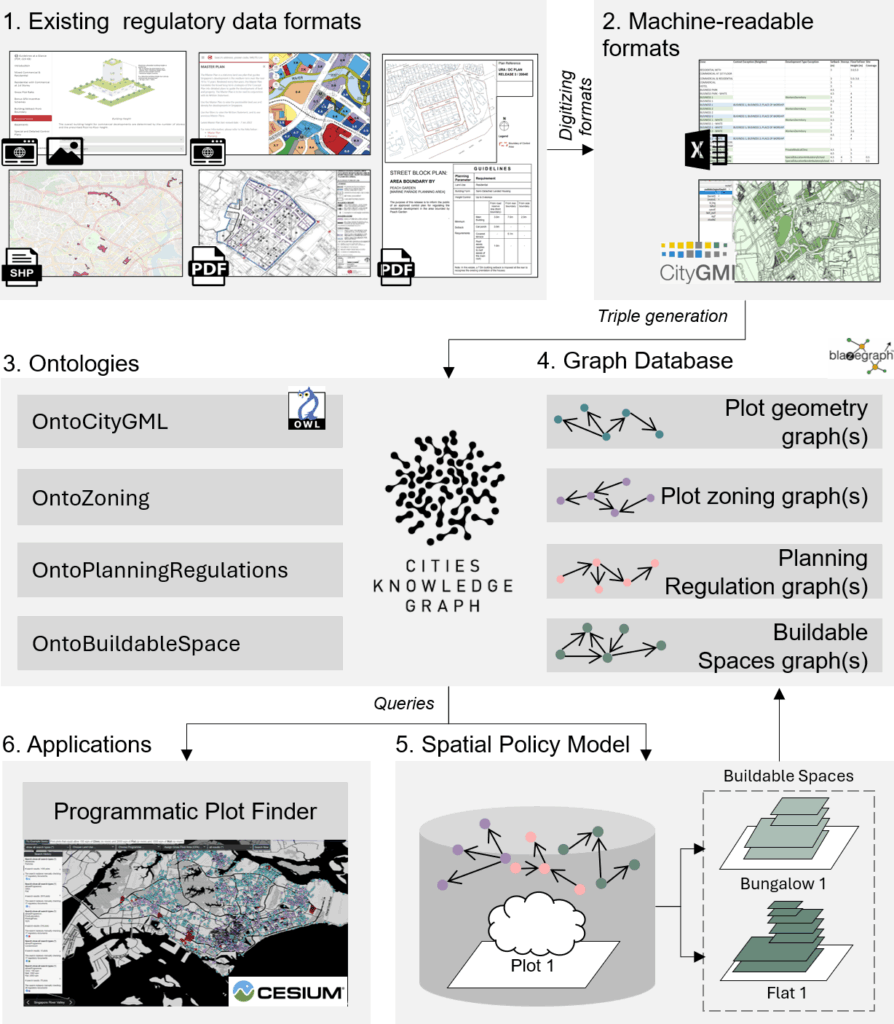
Our paper “3D Land Use Planning: Making Future Cities Measurable with Ontology-Driven Representations of Planning Regulations” was presented by Ayda Grisiute at the 28th AGILE Conference on Geographic Information Science, 10–13 June 2025. The work addresses the challenge of evaluating long-term urban strategies by transforming fragmented and inconsistent planning regulations into a unified, machine-readable knowledge graph.
The core contribution is the development of two ontologies: OntoPlanningRegulations and OntoBuildableSpace. Two ontologies connect urban planning rules to 3D city models, enabling scalable analysis of regulatory impacts at scale. This approach powers city-wide estimation of allowable Gross Floor Areas (GFAs) across Singapore and supports applications such as automated site search via a developed Programmatic Plot Finder tool.
We demonstrate how formalized planning data can be used to quantify urban form, simulate regulatory changes, and improve transparency in urban development processes.
Check out our paper and the corresponding code on Github!
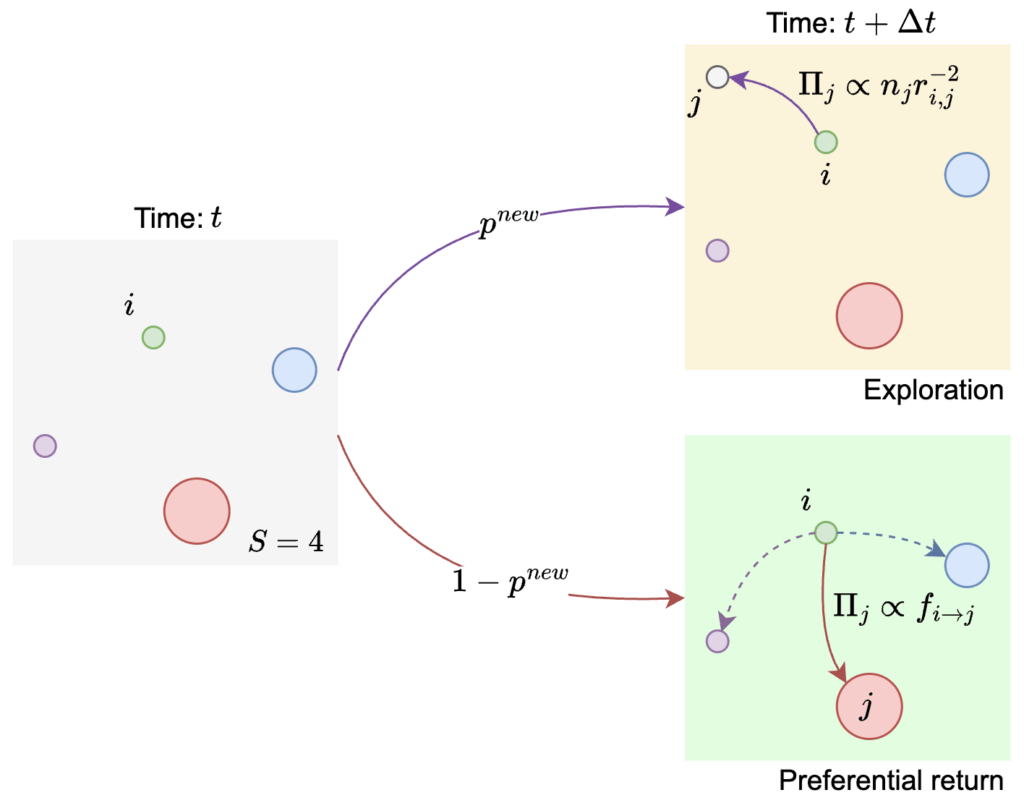
We introduced a Causal Intervention Framework that enables controlled manipulation of mobility-related behavior in synthetic location sequences. This enables us to evaluate how specific behaviors influence the performance of next-location prediction models.
We hope this offers a foundation for future research at the intersection of mobility modeling, interpretation, and explainable AI.
Check out the paper online and the corresponding code on Github!
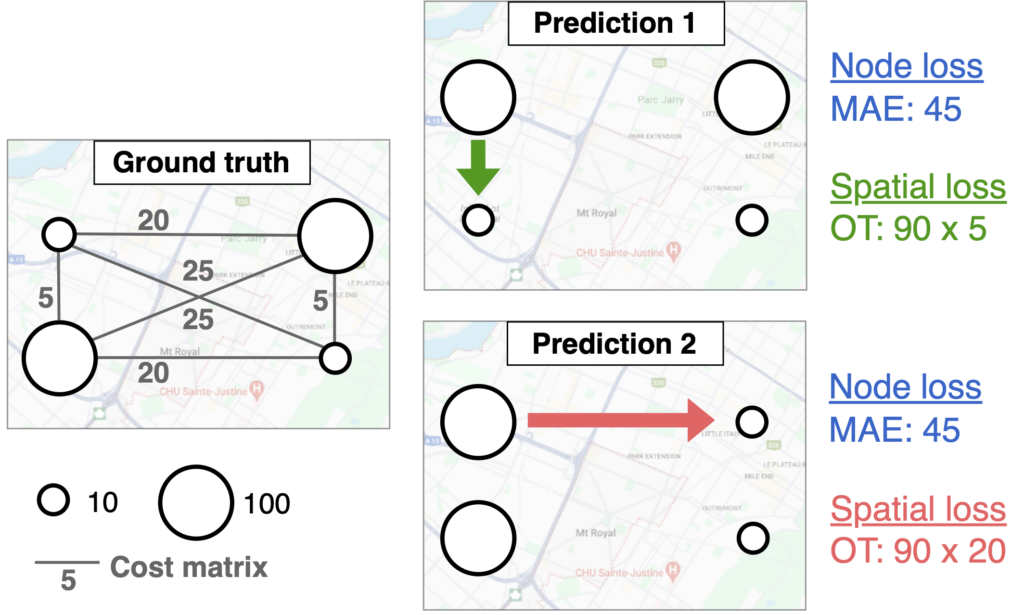
Our paper “GeOT: A spatially explicit framework for evaluating spatio-temporal predictions”, is now published in the International Journal of Geographical Information Science (IJGIS)!
Motivation: While the GIS mantra “spatial is special” is widely acknowledged, it has not made its way into how we evaluate spatio-temporal predictions. Standard error metrics like MSE or MAE are typically averaged over locations, ignore the spatial structure of the data.
Contribution: To close this gap, we propose to leverage Optimal Transport (OT), a theoretical framework to compare two distributions. With OT, we can measure the difference between the true and predicted spatial distribution by computing the minimal transportation costs to align them.
Results: We show that our GeOT framework 1) effectively measures the spatial quality of predictions, 2) relates to spatial autocorrelation, and 3) provides interpretable results. On top of that, this approach is not just a new spatial evaluation metric – it can also be integrated as a loss function in machine learning tasks.
Our new paper, titled “Context-Aware Knowledge Graph Framework for Traffic Speed Forecasting Using Graph Neural Networks,” has been accepted for publication in IEEE Transactions on Intelligent Transportation Systems.
This paper introduces a novel context-aware knowledge graph (CKG) framework to enhance traffic speed forecasting by effectively modeling spatial and temporal contexts. Using a relation-dependent integration strategy, the framework generates context-aware representations that capture the intricate spatio-temporal dependencies of urban environments.
Building on this foundation, a CKG-GNN model is developed, integrating the CKG, dual-view multi-head self-attention mechanisms, and graph neural networks (GNNs). This integration not only significantly improves predictive accuracy but also underscores the importance of contextual information in forecasting traffic dynamics.
By bridging domain knowledge with graph neural architectures, the proposed approach demonstrates its potential for advancing intelligent transportation systems.