Our paper “UrbanFusion: Stochastic Multimodal Fusion for Contrastive Learning of Robust Spatial Representations” was accepted to the International Conference on Machine Learning (ICML 2026)!
In the paper that was led by Dominik Mühlematter as his master thesis at the MIE lab, we are presenting a new method to learn general embeddings of spatial locations that can be used for a variety of downstream tasks. We propose to train with a contrastive loss on masked modality subsets, combined with a reconstruction loss. This scheme not only results in improved performance on downstream tasks such as inferring land use, health indicators or sociodemographics, but is also theoretically shown to retain more information than baseline methods.
The paper will be presented at the ICML conference in Seoul, South Korea, July 6th-11th.
We welcome Wolin Jiang who will start his PhD at the MIE Lab on the topic of causal inference for car sharing interventions. Wolin is interested in the interplay between individual travel behavior and mobility stakeholders in urban systems. He is excited about applying causal inference to improve shared mobility. Before joining ETH, he received his master’s degree from UC Berkeley, where he focused on using reinforcement learning and game theory to optimize on-demand shared ride operations. He received his bachelor degree in Civil Engineering at Tongji University, Shanghai.
Nina Wiedemann, a postdoctoral researcher at the MIE Lab, has been awarded the Förderpreis Geoinformatik by Runder Tisch GIS e.V. for her dissertation titled “Spatio-temporal effects in GeoAI: from predictability to evaluation.” She presented her work at the Münchner GI Runde on March 19, where she was selected as the award recipient by an independent jury.
Martin Raubal gave a talk titled “Towards Behaviorally Informed GeoAI for Spatial Decision-Making” at Münster. The presentation focused on the growing role of GeoAI and geospatial foundation models in spatial research and applications, while emphasizing that these approaches often pay limited attention to human behavior. It showed how neglecting cognition, habits, and biases can lead to misleading analyses and predictions that do not fully reflect lived human experiences.
Using examples from active mobility and aviation training, the talk demonstrated how behavioral insights can be incorporated into GeoAI to support more realistic and human-centered spatial decision-making for sustainability.
We are pleased to share that Dr. Ye Hong, a postdoctoral researcher at MIE Lab, will join the Department of Human Geography at Lund University as Assistant Professor in (Geo)AI and Regional Development starting in May 2026.
Ye’s research focuses on GIS, human mobility analysis, and generative (Geo)AI. His work develops data-driven methods to understand how people move and interact with urban environments, with applications in sustainable transportation, urban planning, and regional development.
At Lund University, Ye will continue advancing research on mobility data and artificial intelligence for spatial analysis, contributing to interdisciplinary work on sustainable urban systems and regional development.
We congratulate Ye on this appointment and wish him all the best as he begins this new chapter in Sweden.
We congratulate Dominik on completing his Master’s degree in Geomatics Engineering at ETH Zurich. Dominik wrote his Master’s thesis at the MIE Lab, where his work earned excellent grades and strong recognition.
Dominik received the ETH Medal for an outstanding Master’s thesis and the Willi Studer Prize for the highest average grade in the program (5.83/6).
His thesis, “UrbanFusion: Stochastic Multimodal Fusion for Contrastive Learning of Robust Spatial Representations,” introduces a self-supervised learning framework that builds unified spatial representations from multiple data sources. The model combines coordinates, street-view images, remote sensing, maps, and points of interest, and was trained and evaluated across 56 cities worldwide. The resulting embeddings support a wide range of urban analytics tasks, including housing price, energy consumption, land use, and public health predictions.
We are grateful to everyone involved in the project and proud to have supported Dominik during his time at MIE. We wish him all the best as he moves into the energy sector.
More information about Dominik’s background is available on his LinkedIn profile
Victoria is a visiting PhD student at the MIE Lab in fall 2025 and spring 2026. She has been pursuing her PhD at the Chair of Traffic Engineering and Control at the Technical University of Munich since 2022, and has a background in Computational Science and Engineering and Civil Engineering. Her research interests revolve around leveraging geospatial data to address transportation challenges. This includes the use of trajectory data for bicycle routing and mode choice modelling, where she employs optimisation and machine learning techniques to develop data-driven solutions.
Methodological focus: Spatio-temporal data mining and analysis, machine learning, and predictive models.
Martin Raubal gave the keynote speech at the ZVR Traffic Law Conference 2025 at the Vienna University of Economics and Business in Austria. His talk ‘Sustainable Mobility – quo vadis’ focused on the importance of geodata and -technologies for sustainable mobility and introduced current research on electric mobility, V2G technologies, and behavior change. The slides of the talk (in German) are available here.
Our new paper, “Quantifying the Impacts of Non-Recurrent Congestion on Workplace EV Charging Infrastructures”, is now published in Transportation Research Part D: Transport and Environment (Vol. 138, 2025). The study addresses a critical but overlooked issue: how unexpected traffic accidents and congestion ripple into EV workplace charging systems that rely on smart-charging and solar integration.
Motivation: Workplace EV charging is expected to play a major role in absorbing surplus midday solar energy. Smart-charging algorithms are typically optimised using historical travel patterns, but unexpected congestion can cause many EVs to arrive simultaneously once traffic clears. These concurrent arrivals create demand surges, raising operating costs and reducing trust in EV charging infrastructure.
Contribution: We develop a co-simulation framework that couples a scalable traffic simulator (Cell Transmission Model, CTM) with a high-fidelity EV charging simulator (ACN-Sim). The integrated pipeline:
Results & Policy Insights: Using Minneapolis as a case study, we find that non-recurrent congestion can increase Time-Of-Use (TOU) costs by up to 27%. However, access to timely accident information reduces these surprise costs by more than 50%, showing the value of integrating traffic data into charging operations.
Policy recommendations include: Installing slightly higher charging capacity (10–15% above historical demand), deploying faster Level 2 chargers for greater robustness, and co-optimising charging with building loads to reduce surprise costs. Investing in early-warning systems for traffic accidents incorporating and real-time traffic information utility coordination could also significantly reduce the risk propagation from the transpiration layer to the power system.
👉 Check out the open-source code and data on GitHub.
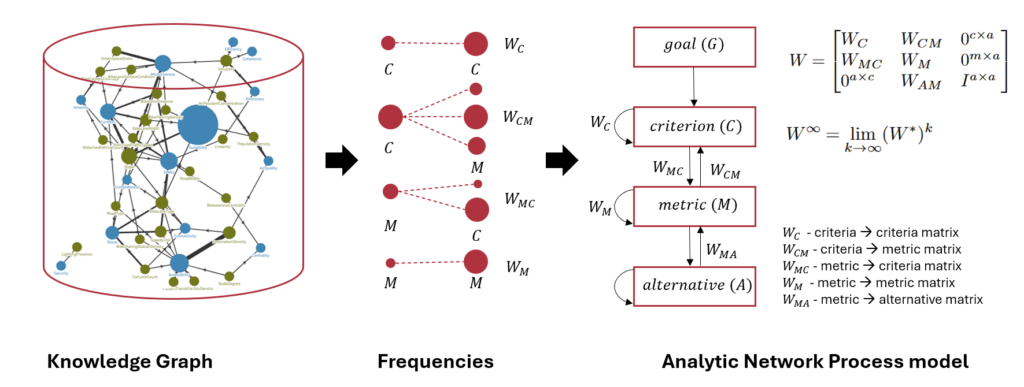
Our new paper, “Rethinking Bikeability Indexes: Fusing Knowledge Graph and MCDA Technique for Multi-criteria Bike Network Evaluations,” was presented by Ayda Grisiute at the 28th AGILE Conference on Geographic Information Science, 10–13 June 2025. It introduces a novel method for evaluating bike infrastructure by integrating a curated knowledge graph of bikeability metrics with the Analytic Network Process (ANP), a decision modelling technique.
The study addresses limitations in current bikeability indexes, which often oversimplify how different metrics interact. By combining over 270 metrics and 41 qualitative criteria from global studies with ANP’s ability to model interdependencies, our approach offers a more rigorous and transparent way to evaluate cycling networks. Applied to Zurich’s road network, the method produces a segment-level bikeability index and includes sensitivity analysis to assess the robustness of results under structural changes.
Check out our paper and the corresponding code on Github!