Our paper “3D Land Use Planning: Making Future Cities Measurable with Ontology-Driven Representations of Planning Regulations” was presented by Ayda Grisiute at the 28th AGILE Conference on Geographic Information Science, 10–13 June 2025. The work addresses the challenge of evaluating long-term urban strategies by transforming fragmented and inconsistent planning regulations into a unified, machine-readable knowledge graph.
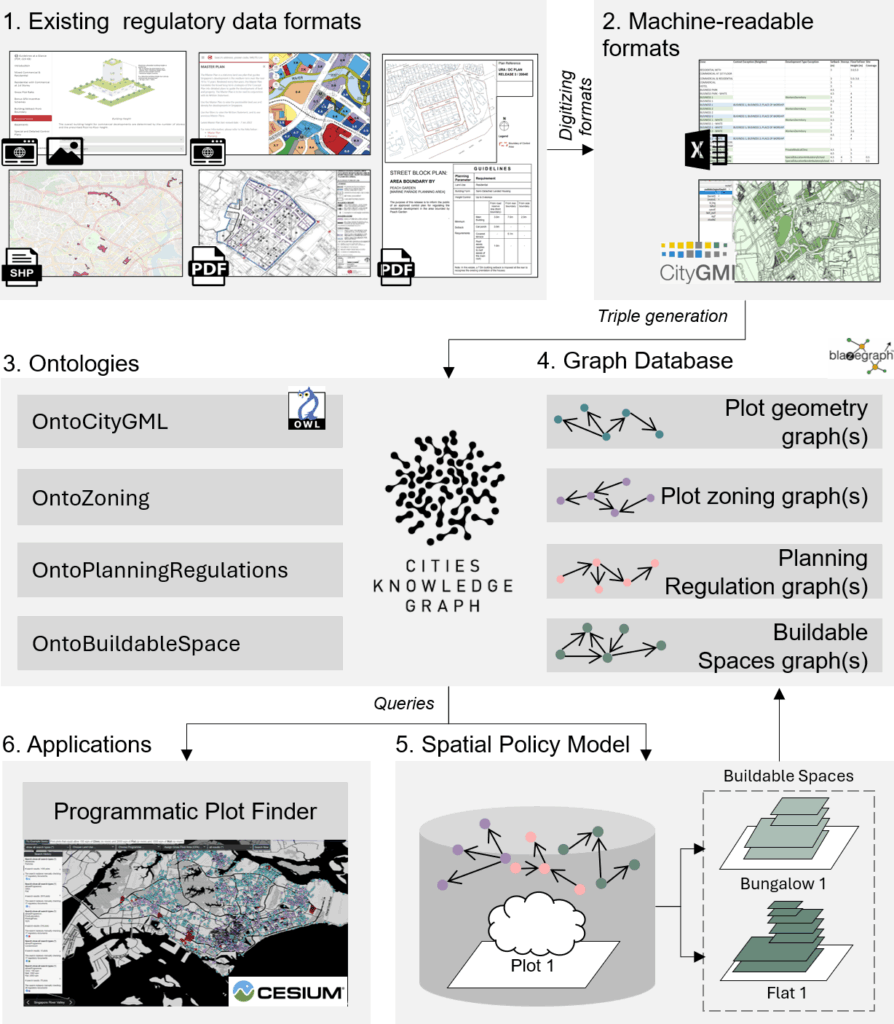
The core contribution is the development of two ontologies: OntoPlanningRegulations and OntoBuildableSpace. Two ontologies connect urban planning rules to 3D city models, enabling scalable analysis of regulatory impacts at scale. This approach powers city-wide estimation of allowable Gross Floor Areas (GFAs) across Singapore and supports applications such as automated site search via a developed Programmatic Plot Finder tool.
We demonstrate how formalized planning data can be used to quantify urban form, simulate regulatory changes, and improve transparency in urban development processes.
Check out our paper and the corresponding code on Github!